Przez ponad dwadzieścia lat budowy podziemnych sieci kanalizacyjnych, co jakiś czas przychodzi nam się spotkać z próbami porównywania naszej technologii Wierceń Grawitacyjnych (WG), do bardzo popularnej technologii Poziomych Przewiertów Sterowanych/Kierunkowych (HDD), z angielskiego Horizontal Directional Drilling. Czym jest technologia HDD? Jak wygląda budowa podziemnych instalacji przy pomocy technologii WG? Czy technologia WG jest porównywalna do HDD? Jakie są podobieństwa i jakie różnice pomiędzy tymi technologiami? Czy technologia Wierceń Grawitacyjnych (WG) jest lepsza od od technologii poziomych przewiertów sterowanych (HDD)? Czy gorsza? Czy technologia WG to odmiana technologii HDD? W niniejszym opracowaniu postaramy się odpowiedzieć na powyższe pytania, poprzez przedstawienie, czym jest technologia Wierceń Grawitacyjnych, w porównaniu do technologii HDD.
Zacznijmy najpierw od powszechnie stosowanej i popularnej technologii Poziomych Przewiertów Sterowanych, nazywanych skrótowo HDD, od angielskiej nazwy Horizontal Directional Drilling.
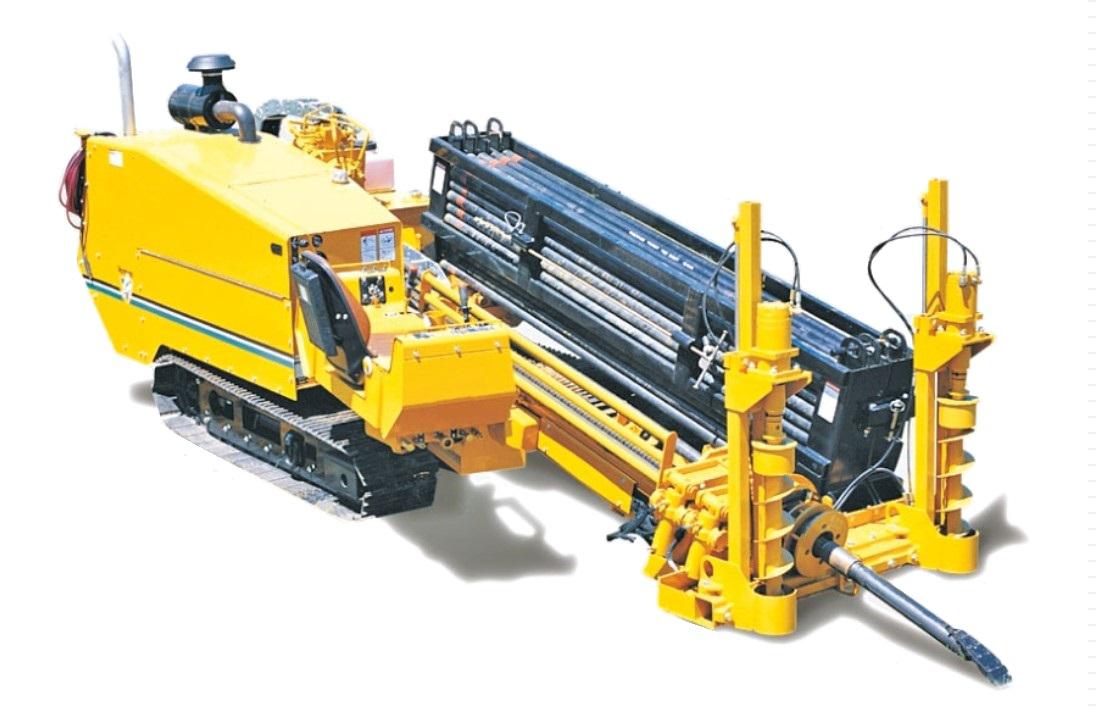
Sama nazwa tej technologii wskazuje, że dotyczy ona budowy podziemnych instalacji poprzez poziome przewiercanie się pod ziemią, mając do dyspozycji możliwość sterowania kierunkiem przewiertu, zarówno w płaszczyźnie pionowej (zmiana głębokości) jak i poziomej. Możliwa jest zatem budowa instalacji, mających zarówno prosty jak i nie prostoliniowy przebieg. Możliwe jest wykonanie rurociągów, których trasa omija lokalne przeszkody terenowe, takie jak podziemne konstrukcje, koryta rzek, bagna, tereny górskie, płyty lotnisk oraz inne tereny o dużej rozciągłości i ograniczonej dostępności. Sterowanie kierunkiem przewiertu jest możliwe dzięki zastosowaniu głowicy wiercącej, wyposażonej w dodatkowy element - płetwę sterującą, zamocowaną u czoła głowicy, pod kątem w stosunku do osi głowicy. Dodatkowo w głowicy wiercącej zainstalowany jest nadajnik sygnału, informujący o aktualnym położeniu płetwy sterującej, aktualnym spadku oraz o głębokości uzyskanej przez głowicę. Sygnał ten jest odbierany przez operatora, wyposażonego w specjalny odbiornik. Zestaw nadajnika oraz odbiornika nazywany jest Systemem Lokalizacji.

Wykonywanie prostego odcinka przewiertu w gruncie odbywa się przy jednoczesnym pchaniu głowicy wiercącej, wraz z towarzyszącym ruchem obrotowym, w przypadku wiercenia na wprost, ze stałą prędkością obrotową w zakresie zazwyczaj 50-200 obr/min, w zależności od typu maszyny, rodzaju gruntu i średnicy instalowanej rury. W przypadku konieczności zmiany trajektorii wiercenia, następuje zatrzymanie przez operatora maszyny, obrotów głowicy wiercącej w takim położeniu płetwy sterującej, że poprzez dalsze pchanie głowicy, grunt napierający na płetwę sterującą, spowoduje zmianę kierunku głowicy wiercącej. Proces pchania z wyłączonym obrotem głowicy jest realizowany do momentu uzyskania wymaganego kierunku. Analogicznie odbywa się korekta trasy wiercenia, gdy nagle okaże się, że w wyniku napotkania na przeszkodę, zadana trajektoria wiercenia uległa odchyleniu. Na poniższej ilustracji zobrazowano sposób sterowania kierunkiem przewiertu, w przypadku nieoczekiwanej zmiany zadanej trajektorii.
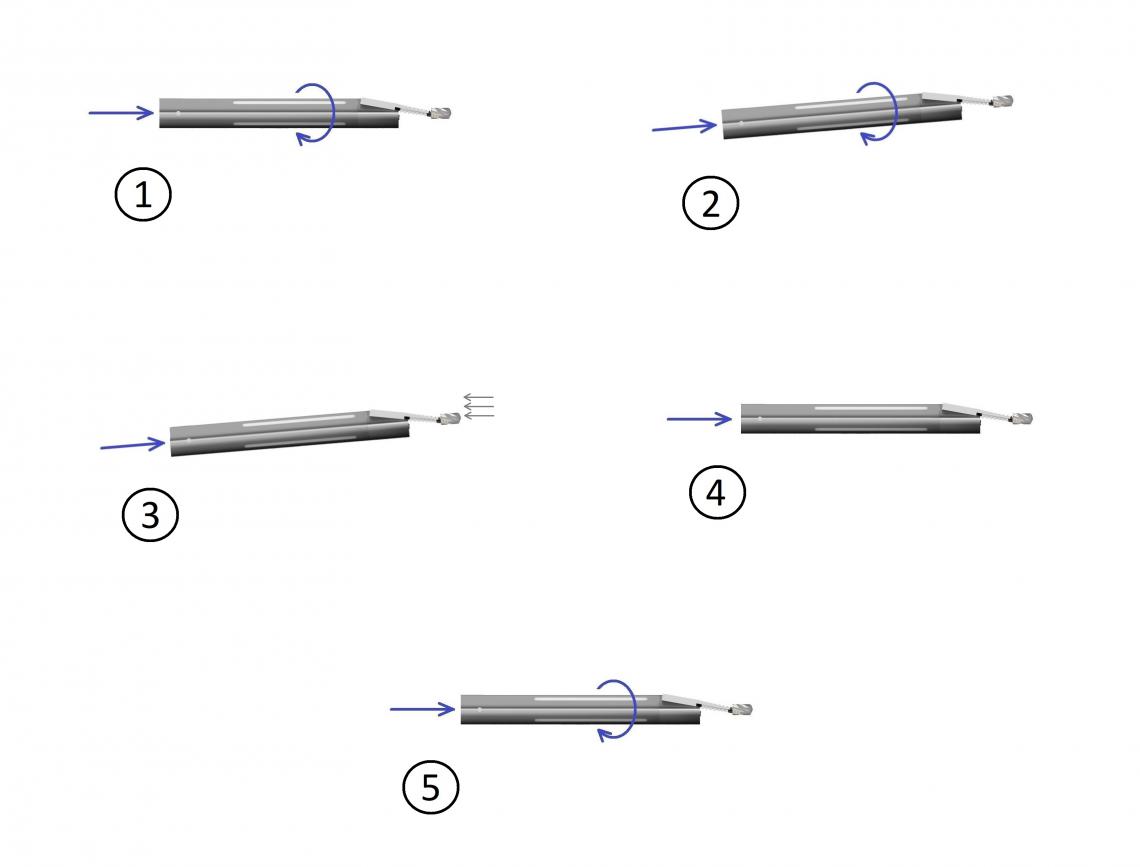
ILUSTRACJA 1.
Proces wiercenia odbywa się bez konieczności zmiany kierunku i zgodnie z zadaną trajektorią. Nie ma konieczności korekty kursu. Głowica jest pchana w kierunku przewiertu oraz towarzyszy jej obrót o stałej prędkości obrotowej.
ILUSTRACJA 2.
Podczas wiercenia natrafiliśmy na przeszkodę, która zmieniła zadaną i wymaganą trajektorię przewiertu. Przewiert zaczyna nam się kierować ku górze, zamiast iść poziomo, jak planowaliśmy.
ILUSTRACJA 3.
Aby powrócić do pierwotnie zadanego kierunku przewiertu, ustawiamy płetwę sterującą na głowicy spadkiem w dół. Następnie w tej pozycji zatrzymujemy ruch obrotowy głowicy. Pozostawiamy jedynie pchanie głowicy wiercącej w kierunku wykonywanego przewiertu. Pchając głowicę do przodu, wywieramy oddziaływanie gruntu na powierzchnię płetwy, które powoduje, że głowica zaczyna nam się kierować w dół, czyli wraca nam do pierwotnie zadanej trajektorii.
ILUSTRACJA 4.
Kontynuując jedynie pchanie głowicy w przód, mając wciąż wyłączony ruch obrotowy, doprowadzamy do stanu, w którym kierunek głowicy dochodzi do kierunku pierwotnie zadanego.
ILUSTRACJA 5.
Uzyskawszy pierwotnie zadany kierunek, ponownie przywracamy ruch obrotowy głowicy, ze stałą prędkością obrotową i kontynuujemy przewiercanie się.
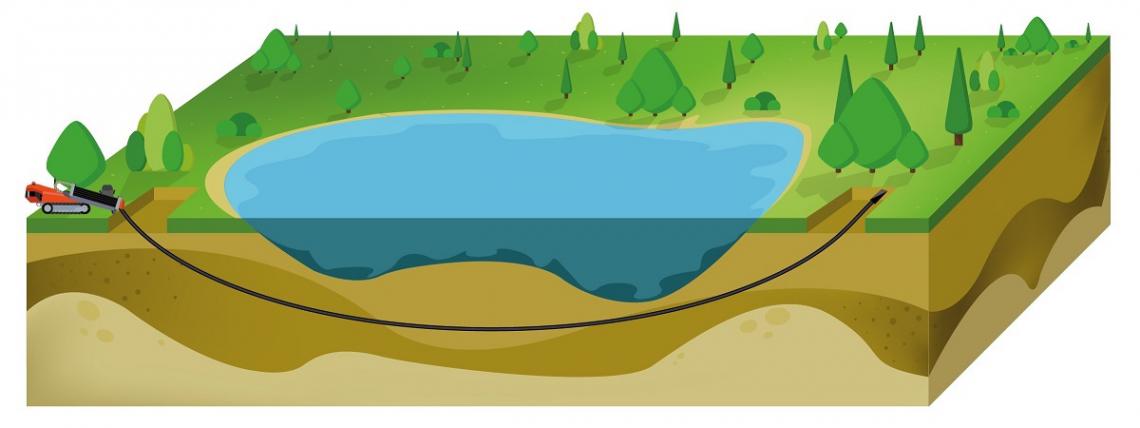
Analogicznie sterowanie kierunkiem przewiertu odbywa się, kiedy celowo chcemy zmienić trajektorię przewiertu. Jeśli chcemy ominąć przeszkodę terenową, np. koryto rzeki, wówczas zatrzymujemy ruch obrotowy głowicy wiercącej, w pozycji z płetwą skierowaną w dół. Wówczas napór gruntu na płaszczyznę płetwy spowoduje pogrążenie się głowicy wiercącej w głębsze warstwy gruntu. Uzyskawszy zadaną głębokość, np. przejścia pod korytem rzeki, poprzez ponowną zmianę położenia kierunku płetwy sterującej, powracamy do poziomego kierunku wiercenia i poprzez ponowne uruchomienie stałej prędkości obrotowej głowicy, kontynuujemy wiercenie.
Technologia Precyzyjnych Przewiertów Sterowanych HDD, znajduje szerokie zastosowanie do budowy wszelkiego typu instalacji w branżach:
- wodno- kanalizacyjnych
- teleinformatycznych
- energetycznych
- gazowaych
oraz innych, w których wymagane jest wykonanie/położenie pod ziemią rury osłonowej. Jest to jedyna dostępna powszechnie technologia, umożliwiająca bezwykopową budowę instalacji na odcinkach sięgających setek metrów, a nawet przekraczających kilometr. Najdłuższy wykonany przewiert, o którym słyszeliśmy, wykonano w Wielkiej Brytanii, na długości około 4.000 metrów.
Instalacja jest wykonywana najczęściej w trzech etapach. W pierwszym etapie
Czynnikiem umożliwiającym wykonanie podziemnej instalacji w technologii HDD jest zastosowanie systemu płuczki wiertniczej, czyli wodnego roztworu bentonitu. Płuczka ma na celu:
- ułatwienie urabiania gruntu i wypłukiwanie zawiercin
- zmniejszenie tarcia w procesie wiercenia
- stabilizację ścian wierconego otworu
- chłodzenie i smarowanie poszczególnych elementów składowych urządzeń wiertniczych





Komentarze: Technologia Wierceń Grawitacyjnych a technologia HDD